|
|
Networked
Cyber Physical Systems at SRI |
|
An example of cyber-physical ensembles is a swarm of
programmable ground robots and UAVs that perform a distributed surveillance
mission - e.g., to achieve situation awareness during an emergency - by
moving or flying to a suspicious location, collecting information, and
returning to a base location in a formation that creates an effective sensing
grid. This application also involves human-carried computing/communication
devices such as smart phones that collect/report sensor data and inject
users' interests into the system. Heterogeneous nodes have different
capabilities: UAVs can y and generate an encoded video stream with their
front- and bottom-facing cameras. Additional computing resources also enable
UAVs to extract a snapshot from the encoded video and decode it into JPEG
format. Robots can only move on the ground and decode the encoded snapshots
from UAVs. The network is adaptive in the sense that it morphs in response to
the users' needs.
Fig. 1. User's interest is
injected into the network at a location L0 around which the robots/UAVs are
initially clustered randomly. A noise, recorded at a location L1, triggers
the distributed mission. Figure 1 exemplifies the scenario in which a hybrid swarm moves/flies to a location to investigate a
noise reported by an Android phone. The swarm takes a snapshot of the area
and returns to the base location. In this scenario, perturbations from the
environment (e.g., wind), delayed/incomplete knowledge due to network
disruption, and resource contention cause uncertainty. Real-world actions
must compensate for temporary network disconnections or failures. These
actions can only indirectly control parameters, such as a robot's position,
that can be observed by sensors (e.g., GPS). Therefore, a swarm should
dynamically configure itself, optimize its resources, and provide robust information
dissemination services that adapt to the users' interest in a specific topic.
This interest can induce cyber-physical control (e.g., robot positioning, UAV
trajectory/formation modifications) and trigger additional sensing (e.g.,
snapshot of an area). Goals (e.g., interests and controls) and facts (e.g.,
sensor readings and computational results) can arrive from the users and the
environment at any time, and are opportunistically shared whenever
connectivity exists. Programmable robots and UAVs compute their local
solution based on local knowledge and exchange up-to-date information about
the progress of their solution. These abilities enable a distributed and
cooperative execution approach without the need for global coordination. In a
sample mission, the snapshot extracted from the encoded video stream
(abstraction) may be directly sent to other nodes if the network supports it.
If not, the decoded stream (computation) is sent to other nodes in the form
of knowledge (communication). Each node can potentially engage in many
abstractions, computations, and communications, which are classes of
operations regarded as three dimensions of a distributed computing cube. The
completion of a distributed proof accomplishes the mission. The solution
assigns an approximate target region as a subgoal
to a swarm's (macro-scale controls). The swarm moves or flies to locally
realize the subgoal (micro-scale controls). The
distributed reasoning continues to continuously recompute
the local solutions and adjust macro-scale controls accordingly. To satisfy
the subgoal of micro-scale controls, quantitative
techniques such as virtual potential fields or artificial physics compute the
movements of individual UAV/robots. For details, please refer to [1]. 1. J-S. Choi, T. McCarthy, M. Kim, M-O. Stehr.
Adaptive Wireless Networks as an Example of Declarative Fractionated
Systems
10th Int. Conf. Mobile and Ubiquitous Systems: Computing, Networking
and Services (MOBIQUITOUS'13), Dec.
2013, Tokyo, Japan. The underlying cyber-framework was
extended to support various abstractions and APIs for programming a
heterogeneous testbed based on the Parrot AR.Drone 2.0, iRobot Create platforms, and various Android devices. Heterogeneous
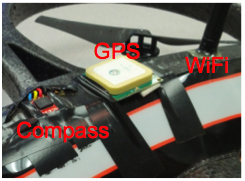
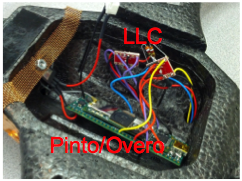
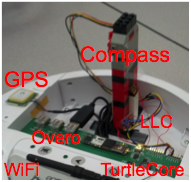
Testbed: The AR.Drones
and Creates were equipped with additional computing resources (Gumstix modules) and sensors (GPS and digital compass)
shown below to increase their autonomy and improve capabilities such as
localization in physical space. The Gumstix
computer is also equipped with a WiFi antenna which provides communication via a peer-to-peer ad-hoc
network. The testbed uses the Google Nexus S
running CyanogenMod 7.2 with
built-in digital compass, GPS, and camera as a standard Android device. As
for the software side, the AR.Drones (firmware ver.
2.3.3) are controlled via WiFi, using a modified
version of JavaDrone (ver. 1.3) [14] for sending
commands and interpreting information from the drone's onboard sensors and
video cameras. JavaDrone was modified to support
video reception from the AR.Drone 2.0 by extracting video frames
from the stream and passing them directly to the framework rather than
attempting to decode them. This encoded frame data can be decoded later when
it is deemed necessary, possibly on another device with more available
computing resources. The Creates are controlled via a direct serial port
connection from the Gumstix using the cyber-API which supports sending movement and audio commands.
We tested an autonomous outdoor
mission for distributed surveillance where a swarm of 3 AR.Drones,
4 iRobots, 2 Android phones in a 70m x 35m parking
lot collects information about a target location. It is fully distributed and shows the
core ideas of autonomous control of fractionated system. The localization is done without
infrastructural support like a base station as a command/control post or
external camera-based localization. First, a user’s interest injected as a
goal. The other android app is used to report a sensor data to trigger the
mission. The drones/robots are starting to
move towards the target location, and take a picture then come back to the
position where a user located.
|
|||||||||||||||||||||
|
|
|
|||||||||||||||||||||







Last updated: Mar
12, 2014